締め切りの2日前、と言っても拠点郵便局の時間外受付窓口から、ようやく提出モデルを発送して、ほっと一息ついたところです。ほっとするのは良いけれど、今週末は第2回目の試走会だし、関東大会の本番もすぐ目の前でどうしよう・・・
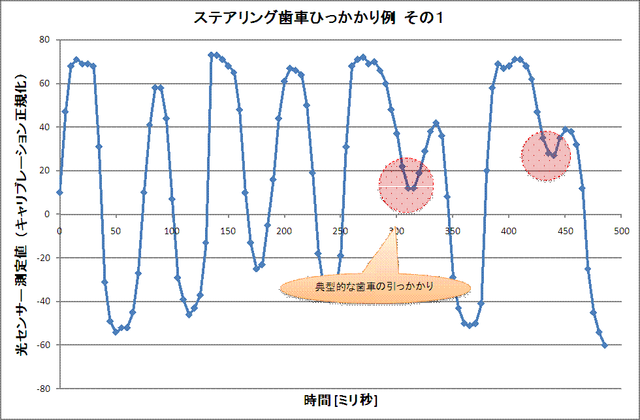
歯車の引っかかりを示唆する実験結果のグラフを何人のかたに見てもらったところ、バックラッシュ(歯車の遊び)の調整不良ではないかと指摘を受けました。
締め切りの2日前、と言っても拠点郵便局の時間外受付窓口から、ようやく提出モデルを発送して、ほっと一息ついたところです。ほっとするのは良いけれど、今週末は第2回目の試走会だし、関東大会の本番もすぐ目の前でどうしよう・・・
歯車の引っかかりを示唆する実験結果のグラフを何人のかたに見てもらったところ、バックラッシュ(歯車の遊び)の調整不良ではないかと指摘を受けました。
マーカー(灰色区間)検出の精度を上げようと色々な工夫を試みていますが、なかなか上手くいきません。
いろいろと実験してみると、稀にステアリングの歯車がひっかかり、ステアリングを左右に振る動作の途中で跳ね返されていることが分かりました。稀とはいえ、モーターの新旧に関わらず、数秒に1回位は発生するので無視できません。さて対策が思いつかない・・・ ^_^;
参加者メーリングリストでPathFinderのタッチセンサー部分改造(丸帽子式)の話題が挙がっていたので、参考までに勝手に解説! ちなみに、実行委員会にて承認された方法(部品)以外での改造は大会当日の車検をパスできないのでお気を付けください!
計測器の世界における一般的なキャリブレーション(校正)の説明は Wikipedia に詳しく書かれていますので、こちらを参考にしてください。
次にETロボコンにおけるキャリブレーションの説明ですが、ほとんどの出場チームは光センサーによるコースライン(黒線/灰色マーカー)認識をより正確(確実)におこなうための調整のことをキャリブレーションと呼んでいます。
Mindstorms RCX の光センサーの動きをハードウェア面から調査した結果を下記に公開します。
brickOSは、疑似PWM(Pulse Width Modulation)制御で、モーターの出力を調整しているらしい、ということは分かっていたのですが、具体的な制御方法や制御の遅れ時間が不明であったため、自分で調査した結果を下記にまとめました。
BrickOS(RCX)のモーター制御には、正回転(forward)、逆回転(reverse)、開放(off)、ブレーキ(brake)の4種類の制御モードがあります。
開放(off)とブレーキ(brake)は一見モーターが停止している状態が同じに見えますが、指で車輪(モーター)を回転させてみると、開放とブレーキで車輪(モーター)の回転の滑らかさが異なる(後者はブレーキがかかっている)ことが分かります。
モーターを制御した時のRCXの出力ポートの電圧を測定することで、BrickOS(RCX)のモータ制御方法(ブレーキの原理)を考察します。
おなじく2007年の資料ですが、参考までに掲載します。
LEGOの光センサーブロック全体を遮光することによる外乱光カット効果の確認
ライントレースのための反射型光センサーに悪影響をもたらす外乱光(太陽光)をカットするために、センサーの周囲から回り込む光の遮蔽、反射防止の工夫を重ねたが外乱光の影響をすべてカットすることができなかった。
LEGOブロックの光センサーそれ自体のプラスチック素材を外乱光が透過してセンサーの測定に悪影響を及ぼしているのではないかと仮定して、光センサーブロック全体をアルミホイルで遮光して実験することにした。
光センサーブロック全体をアルミホイルで遮光することにより外乱光(太陽光)の影響をカットできることが確認できた。
光センサーのLEGOブロックを太陽に透かしてみると可視光線もわずかではあるが透過していることが確認できる。
さらに多くの赤外光がプラスチック素材を透過して、光センサーの測定を乱していることが推測できる。
2007年の実験ですが参考までに掲載します。
コース検出(ライントレース)を行う反射型光センサーを撹乱する外乱光をカットするための遮光板の効果測定