参加者メーリングリストでPathFinderのタッチセンサー部分改造(丸帽子式)の話題が挙がっていたので、参考までに勝手に解説! ちなみに、実行委員会にて承認された方法(部品)以外での改造は大会当日の車検をパスできないのでお気を付けください!
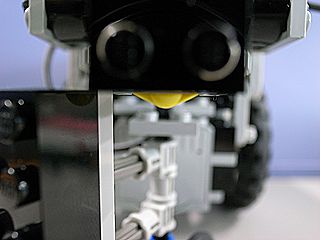 |
| タッチセンサー正面拡大写真 |
|---|
タッチセンサーは写真のように、下のLEGOブロックが黄色いスイッチ部分を上に押し込むことでステアリング(舵)のセンターポジションを検出しています。
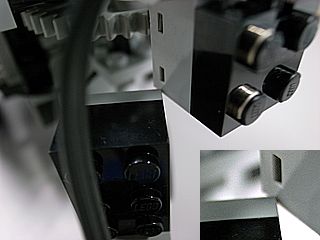 |
| LEGOブロックが引っかかったところ |
|---|
ステアリングがセンターに来たときに、タッチセンサーが確実に押し込まれるようにするには、ブロックの隙間をギリギリに調整する必要があります。しかしながら、上下のブロックの隙間をギリギリにすると、走行時の振動やブロックの弛みで、ステアリングを左右に切ったときにお互いのブロックが引っかかり、センターへ戻らなくなることがあります。
 |
 |
| 丸帽子方式 |
|---|
ということで丸い形をしたLEGOブロック(タイル)を下のブロックに取り付けて、ステアリングを左右に振ったときに上下のブロックが引っかかることを防止します。
もしタッチセンサーの状態をプログラムで取得する必要がないのであれば、上下のブロックの隙間を少し広めにすることで解決することも出来ます。
‘LEGO’ は、レゴグループの登録商標です。
