この投稿は ETロボコン Advent Calendar 2017 の 4日目 の記事です。
背景
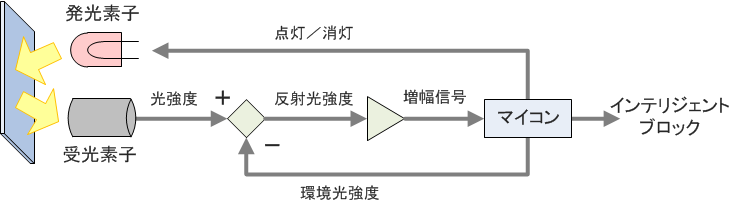
初代 Mindstorms RCX、二代目 Mindstorms NXT の光センサーは「周辺光 (Ambient Light)」の影響を強く受けました。具体的には、ETロボコンの競技コースに天窓から日差しが差し込んだり、舞台照明用のスポットライトを競技コースに当てると、光センサーの測定値が想定外の値に触れてしまい、コースアウトする走行体が続出しました。
この周辺光の影響を打ち消す手段として私が2009年の関東地区大会で開発した方法が『まいまい式』です。
Mindstorms NXTが走行体に採用されていた2014年大会頃までは、さまざまな参加チームの皆さんが「まいまい式」に改良を加えて提案してくださったのですが、走行体がMindstorms EV3に置き換わってからは「まいまい式」が、ETロボコンで言及される回数も減りました。
Mindstorms EV3の標準カラーセンサー(光センサー)を使ってみると、周辺光の影響を受けにくくなっていることが経験的にわかります。では「まいまい式」は死んでしまったのか? オワコンなのか? ナシ寄りのナシなのか? EV3カラーセンサーの動作を検証して確かめてみます。 😀
続きを読む