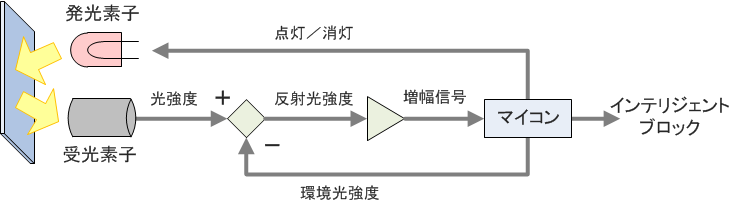
Mindstorms EV3の標準カラーセンサーを反射モードで動作させたときのセンサーの自動キャリブレーションの仕組みをブロック図にしてみました。旧モデルのNXTで光センサーを使うときはMindstormsの動作環境に合わせて環境光(外乱光)を事前に測定してキャリブレーションする必要がありましたが、新しいEV3ではカラーセンサーに内蔵されているマイコンが自動的に環境光をキャンセルするキャリブレーション機能を持っているようです。
LEGO社が公開しているEV3ハードウェア開発キット(EV3 hardware Developer Kit)の情報をもとに上記のブロック図は作成しましたが、EV3カラーセンサーに内蔵されているマイコンのプログラムが公開されていないため一部想像で描いています。ご了承ください。
- LEGO ® MINDSTORMS ® Education EV3 Developer Kits
- https://education.lego.com/en-us/support/mindstorms-ev3/developer-kits
EV3カラーセンサーに内蔵されているマイコンは反射モードに切り替わると発光素子(Floodlight)を高速で明滅させます。消灯しているときに環境光(backlight)を測定し、発光素子を点灯して反射光を測定するときは前述の環境光を引き算します。
ということで、NXTで実現した「まいまい式」とほぼ同じ方法を使って、EV3の光センサーに内蔵されたマイコンのファームウェアが外乱光のキャンセルを実現してます。特許を持っていたら私も大金持ち… 特許を出しても公知の技術で却下されていたでしょうが… 😀