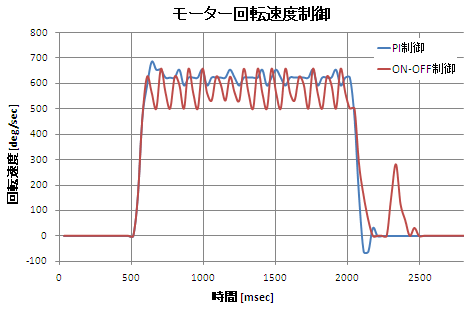
PI制御でモーターの回転スピードをコントロールするところまで辿り着きました。
brickOSは、疑似PWM(Pulse Width Modulation)制御で、モーターの出力を調整しているらしい、ということは分かっていたのですが、具体的な制御方法や制御の遅れ時間が不明であったため、自分で調査した結果を下記にまとめました。
BrickOS(RCX)のモーター制御には、正回転(forward)、逆回転(reverse)、開放(off)、ブレーキ(brake)の4種類の制御モードがあります。
開放(off)とブレーキ(brake)は一見モーターが停止している状態が同じに見えますが、指で車輪(モーター)を回転させてみると、開放とブレーキで車輪(モーター)の回転の滑らかさが異なる(後者はブレーキがかかっている)ことが分かります。
モーターを制御した時のRCXの出力ポートの電圧を測定することで、BrickOS(RCX)のモータ制御方法(ブレーキの原理)を考察します。