PI制御でモーターの回転スピードをコントロールするところまで辿り着きました。
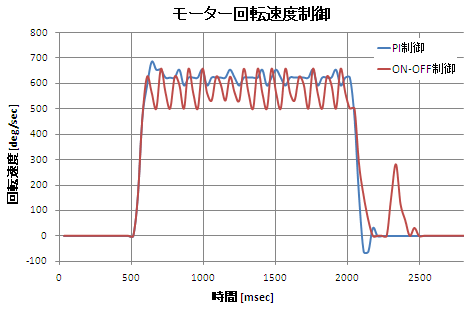
単純なON-OFF制御では、回転スピードが安定しない一方で、PI制御によって回転スピードの安定化に成功したことが上のグラフから分かります。
D(微分)成分も含めたPID制御も検討しましたが、とりあえずP(比例)成分とI(積分)成分のフィードバックだけでも十分に短い時間で目標速度に追従しているのでOKとしました。
限界感度法やステップ応答法をつかって計算でPIDの最適な係数を求めようと試みたのですが、結局のところ、係数を変更してはログを解析して、また係数を変更するという試行錯誤のくり返しで、ようやく、それらしい係数に辿り着きました。この係数まではブログで公開できないな・・・ ^_^;