エニグマ・デコーディング(仮称)攻略の鍵となる超音波センサーの検知特性を実験してみました。
競技規約に載っている「底の形状が円形ではない2リットルのペットボトル」を用意して、どのくらいの範囲を超音波センサーで検知できるか測定しました。しかし2リットルのペットボトルは2kgの重量がある訳で中身の烏龍茶が入ったまま持ち歩くのは結構しんどかった。 😉
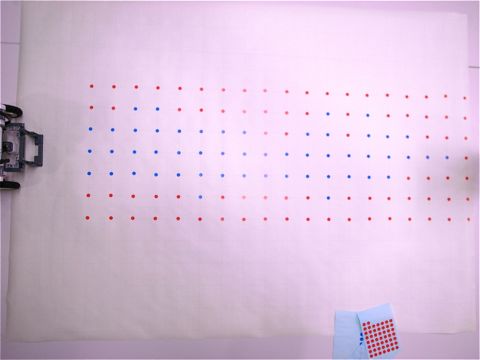
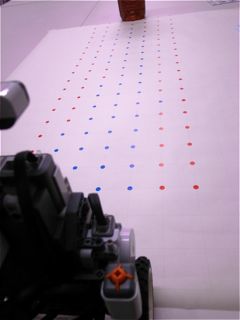
ペットボトルを置いて、超音波センサーが検知した位置には青いシール、検知しなかった位置には赤いシールを貼っています。測定を効率よく行うためにサンプルプログラムを改造して、検知と非検知をビープ音のトーン(周波数)で区別できるようにしました。
検知領域は超音波センサーから遠ざかるにしたがって末広がりに広がるのかと予想していましたが実験の結果はかなり強い指向性があることが分かりました。しかし、ペットボトルの方向をほんの少し傾けるだけで検知したり、しなかったりと敏感に変わることも分かりました。検知領域が微妙に膨らんでいますが、これはペットボトルの角がちょうど上手い具合に超音波を反射しているようです。
多くのみなさんはシーソーや階段の形状に興味津々のようですが、ペットボトルの形状も実は面白いクセがありそうですね。さて、どのメーカーのどの飲料にしますか??? 😀
|どのメーカーのどの飲料にしますか???
いい所に気が付きましたね。
もしかしてペットボトルもスポンサー募集中??? 😀
ホーン付けるまでもなさそうじゃないですか。
とにかく重くてエンコードするのが辛いです。アプローチが横から遠いと特に。横に置いておくというわけにもいかないでしょうし。吊ったらどうかと思います。
またペットボトルの傾きに対する感度が結構大きいようで位置決めしなくてはならないかもしれません。そのときもやっぱり重くて困る。
角の面取りも曲者です。シーソーとか面取りするんですかね?
本部でこの辺練り上げると思ってます。